Obecnie większość siłowników dostępnych na rynku posiada dwa rodzaje metod kontroli siły:
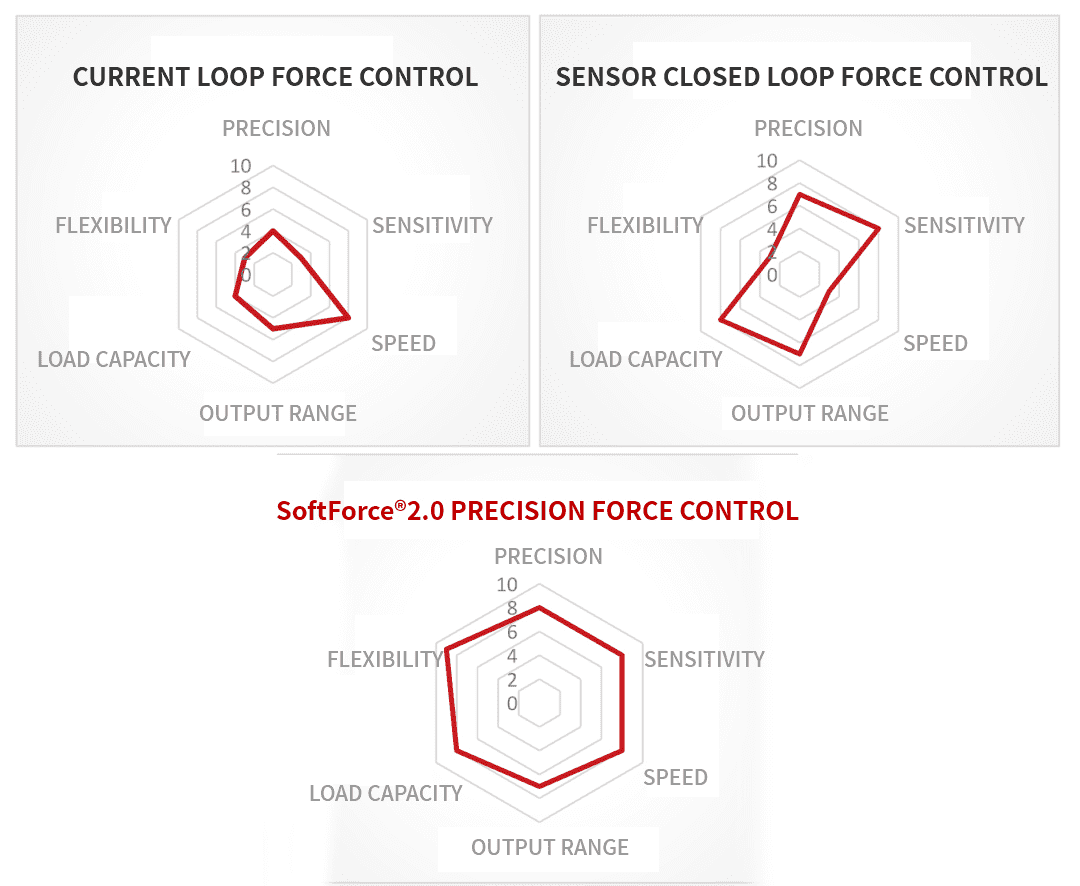
1. Sterowanie siłą pętli prądowej
Stosunkowo łatwa do wdrożenia konwencjonalna metoda kontroli siły, która realizuje kontrolę siły poprzez regulację wewnętrznego prądu silnika.Zaletą jest to, że jest mniej trudny do wdrożenia i pozwala uzyskać kontrolę siły w zakresie dokładności 5% -15%;Wadą jest to, że prędkość ruchu jest niska, nie można jej napędzać w odwrotnym kierunku i nie jest w stanie zaspokoić potrzeb niektórych scenariuszy o wyższych wymaganiach dotyczących precyzji.Po pewnym okresie użytkowania zużycie mechaniczne spowoduje błędy i jeszcze bardziej obniży dokładność.
Siłowniki takie zazwyczaj nie posiadają czujników, a nawet jeśli czujniki są, to służą jedynie jako „wyświetlacze” siły i nie biorą udziału w sterowaniu.Np. dodając czujnik do prasy, czujnik odczytuje wielkość siły i wyświetla wartość za pomocą miernika, który służy do wspomagania ręcznej regulacji wielkości siły, ale taka regulacja generalnie nie ma nic wspólnego z dokładnością siły.

Schemat ideowy, niezwiązany z grafiką i tekstem
2. Sterowanie siłą w pętli zamkniętej czujnika
Inną metodą kontroli siły jest dodanie konwencjonalnego czujnika siły i konwencjonalnego algorytmu sterowania w pętli zamkniętej.Zaletą jest to, że poprawia się dokładność, ale wadą jest to, że prędkość jest nadal niska.W ten sposób można zwiększyć dokładność kontroli siły z 5% do 1%.Jeśli nie ma prawidłowego przetwarzania algorytmu lub prędkość czujnika nie jest wystarczająco duża, jest on podatny na „przekroczenie”.
Siłownik sterowany siłą
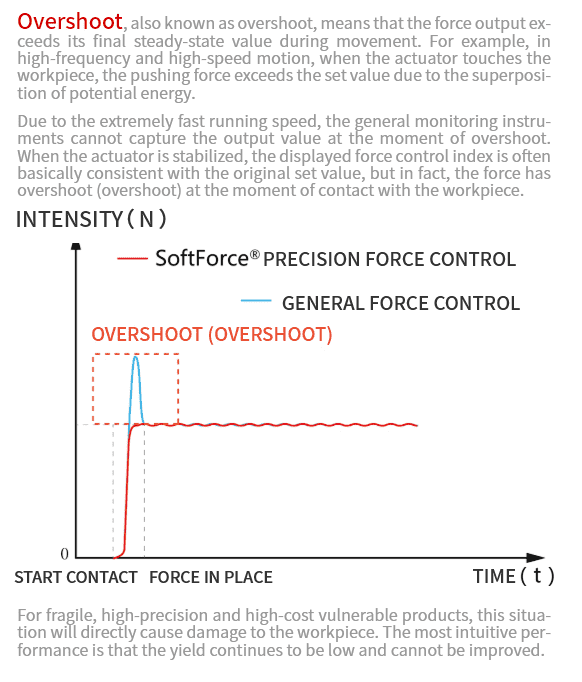
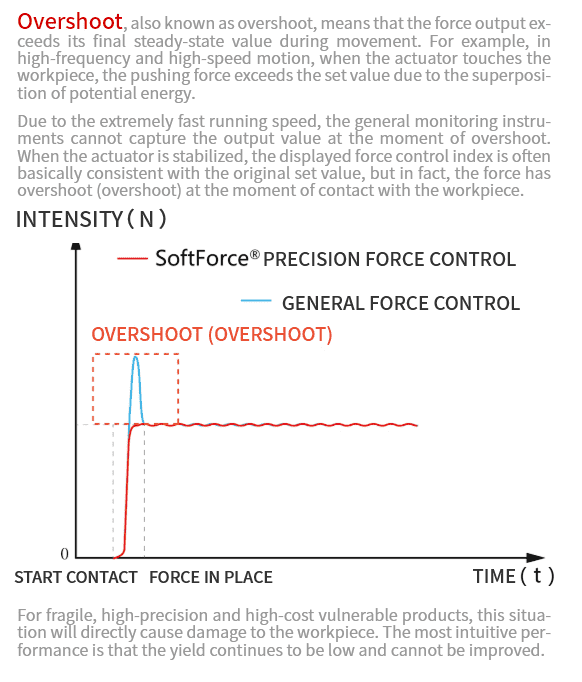
Nieuniknione „przekroczenie”?
Metoda kontroli siły w pętli zamkniętej czujnika jest trudna do poradzenia sobie z siłą uderzenia.Najbardziej bezpośrednim przejawem jest to, że „przeregulowanie” bardzo łatwo wystąpić w przypadku scen o wysokich wymaganiach tempa.
Na przykład
Generalnie przy dużych prędkościach i dużej wydajności moment styku siłownika z obrabianym przedmiotem jest często szczególnie duży.Przykładowo, jeśli siła pchania siłownika jest ustawiona na 10N, łatwo jest osiągnąć 11N i 12N w momencie dotknięcia przedmiotu obrabianego, a następnie zostaje ona przywrócona do 10N poprzez algorytm sterowania.Takie problemy często pojawiają się, gdy na rynek dodawane są czujniki siły i tak zwane siłowniki sterowane siłą.
Problem polega na tym, że szybkość reakcji nie jest wystarczająco duża.Wysoka prędkość oraz precyzyjna i stabilna moc wyjściowa to sprzeczności same w sobie.Jeśli występuje przeregulowanie (przeregulowanie), dokładna siła w miejscu nie ma znaczenia.
Szczególnie w precyzyjnym procesie montażu ciśnieniowego, delikatnych i kosztownych części, przeregulowanie jest generalnie niedozwolone.
Pełna kontrola siły, wysoka częstotliwość i duża prędkość bez przeregulowania?
Jak TA to robi?
W przypadku scenariuszy zastosowań wymagających dużej precyzji przyjmuje się metodę „miękkiego lądowania”, aby uwzględnić wymagania dotyczące dużej prędkości i wysokiej precyzji, czyli segmentowanej kontroli siły.Siłownik szybko zbliża się do przedmiotu obrabianego poprzez tryb ruchu pozycjonującego, szybko przełącza się na tryb kontroli siły w miejscu, w którym będzie miał kontakt z przedmiotem obrabianym, i stopniowo zwiększa moc wyjściową, aż do osiągnięcia zadanej wartości.Tryb pozycji + tryb kontroli siły + czas stabilizacji siły, całkowity wykorzystany czas to wydajność pojedynczego wykonania siłownika.
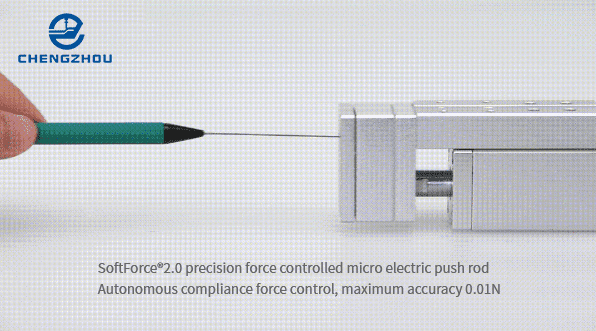
W połączeniu z szybkim czujnikiem siły i algorytmem sterowania predykcyjnego opartym na modelu, precyzyjny siłownik sterowany siłą SoftForce® 2.0 może automatycznie identyfikować położenie siłownika i stan kontaktu z przedmiotem obrabianym, dzięki czemu siłownik będzie końcem automatyzacji sprzęt, pełni tę samą funkcję co ludzka dłoń.percepcja dotykowa, kontrola i inteligencja wykonawcza.
Na tej samej odległości zwiększa się zakres prędkości miękkiego lądowania „SoftForce ®2.0 Precision Force Control”, tolerancja jest większa, a nawet można osiągnąć pełną kontrolę siły, co bezpośrednio poprawia cykl produkcyjny i znacznie zmniejsza koszty prób i weryfikacja błędów.
▋Wysoka częstotliwość przetwarzania w celu osiągnięcia lepszej wydajności
Cykl obliczeniowy powszechnie stosowanego na rynku schematu kontroli siły „sześcioosiowy czujnik siły + robot” wynosi 5-10 milisekund, czyli częstotliwość przetwarzania wynosi 100-200 Hz.Częstotliwość przetwarzania precyzyjnych siłowników sterowanych siłą SoftForce®2.0 może osiągnąć 4000 Hz (tj. 0,25 milisekundy), a modele serii wysokiej częstotliwości mogą osiągnąć 8000 Hz, co stanowi 4-8 razy większą częstotliwość przetwarzania ogólnych siłowników sterowanych siłą robotów.
▋Aktywna, zgodna kontrola siły, która może podążać za zmianą siły zewnętrznej
Efektywna szybkość reakcji i natychmiastowe sprzężenie zwrotne siły umożliwiają siłownikowi natychmiastową reakcję na siły zewnętrzne i osiągnięcie aktywnej, zgodnej kontroli siły.Nawet jeśli podczas pracy wystąpią siły zewnętrzne, można je dostosować w czasie, dzięki czemu proces jest bardziej precyzyjny.Lepsza ochrona obrabianych przedmiotów.
Wysoka częstotliwość i duża prędkość bez przeregulowania
Nawet przy ruchu o wysokiej częstotliwości i dużej prędkości nadal utrzymuje wysoką dokładność wyjściową, a jednocześnie zapewnia „miękkie lądowanie” i „brak przeregulowania”, styka się z powierzchnią części z dużą prędkością i małą siłą i działa elastycznie wybieranie i układanie części itp., aby uniknąć uszkodzenia delikatnych i delikatnych części.Składniki.
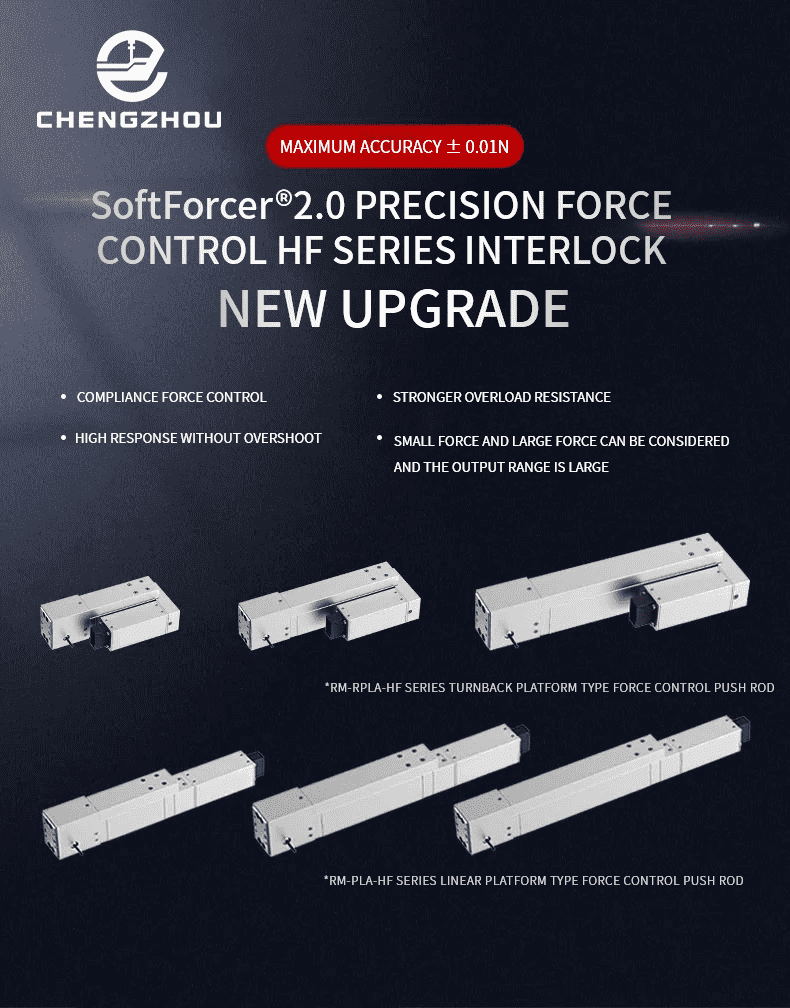
Precyzyjna kontrola siły SoftForce®2.0
Nowa aktualizacja serii HF
▋ Większa odporność na przeciążenia
W oparciu o dogłębne zrozumienie procesu na miejscu i wielokrotne iteracje, w lutym tego roku nowo zmodernizowana seria precyzyjnych kontroli siły HF firmy Chengzhou SoftForce® 2.0 ma zintegrowaną konstrukcję czujnika, a jego zdolność zapobiegania przeciążeniom jest kilkakrotnie większa niż w przypadku przeszłości, o większej trwałości i łatwości użytkowania.Radź sobie z bardziej złożonymi warunkami.
▋Można uwzględnić zarówno małą siłę, jak i dużą wydajność
Wyposażony w precyzyjny system kontroli siły SoftForce® 2.0, precyzyjny stół przesuwny z kontrolowaną siłą i popychacz o dużym skoku i dużym obciążeniu może generować małą i precyzyjną siłę pod dużym obciążeniem, a jednocześnie może uwzględniać siłę czas, a zakres wyjściowy jest szerszy.Większy, tj. szerszy zakres dynamiki siły*.
*Zakres dynamiki siły: Stosunek maksymalnej i minimalnej siły, jaką można wyprowadzić.
Precyzyjne sterowanie siłą może być stosowane tylko na jednej osi
Precyzyjne siłowniki SoftForce®2.0 ze sterowaniem siłą mogą być stosowane nie tylko w jednej osi, ale także zapewniają więcej możliwości w przypadku rozwiązań montażu wieloosiowego.Na przykład najnowszy „synchroniczny system sterowania platformą precyzyjnego sterowania siłą RM Chengzhou 2D” wprowadzony na rynek przez Chengzhou Technology składa się z dwóch precyzyjnych siłowników elektrycznych Chengzhou sterowanych siłą, które mogą zastąpić siłę „czujnika sześcioosiowego + robota” Schemat sterowania, służy do precyzyjnego szlifowania i gratowania wewnętrznych ramek telefonów komórkowych itp.
Chengzhou 2D synchroniczny precyzyjny system sterowania platformą kontroli siły
(Wyposażony w precyzyjny system kontroli siły SoftForce®2.0)
Wyrafinowane i łatwe w obsłudze profesjonalne usługi
Zaawansowany algorytm sterowania i prosty proces debugowania zapewniają klientom wygodę użytkowania.Nawet operator z niskim doświadczeniem może rozpocząć pracę w ciągu 5 minut, naprawdę „podłącz i używaj”.
Jednocześnie profesjonalny i silny zespół obsługi posprzedażnej Chengzhou Technology może zapewnić klientom terminowe, kompleksowe i bezproblemowe wsparcie techniczne już po raz pierwszy, niezależnie od tego, czy są to wątpliwości techniczne, nauczanie, rozwiązywanie problemów czy konserwacja.
Chengzhou Technology zawsze była na tyle odważna, aby poszerzać swoje granice.Dzięki swojej solidnej i innowacyjnej sile technicznej stale wprowadza na rynek bardziej inteligentne, bardziej precyzyjne i bardziej kompatybilne, wysokiej jakości produkty uruchamiające, aby dostarczać zaawansowane produkty do pakowania i testowania półprzewodników, automatyzacji 3C, produkcji precyzyjnej, inteligentnej medycyny i innych branż.podstawowe komponenty, takie jak precyzyjne systemy sterowania ruchem i siłowniki.
Czas publikacji: 31 maja 2022 r