
Z punktu widzenia struktury funkcjonalnej generator podciśnienia to głównie elektromagnetyczny zawór sterujący sterujący generatorem podciśnienia w celu wygenerowania i zatrzymania podciśnienia, aby osiągnąć funkcję przyciągania i uwalniania przedmiotu obrabianego.
W rezultacie system zazwyczaj składa się z następujących elementów: 1. Źródło sprężonego powietrza;2. Filtr;3. Przełącz zawór elektromagnetyczny;4. Siłownik próżniowy;5. Przyssawka końcowa, poduszka powietrzna itp. (Typowa konstrukcja pokazana jest na poniższym rysunku).
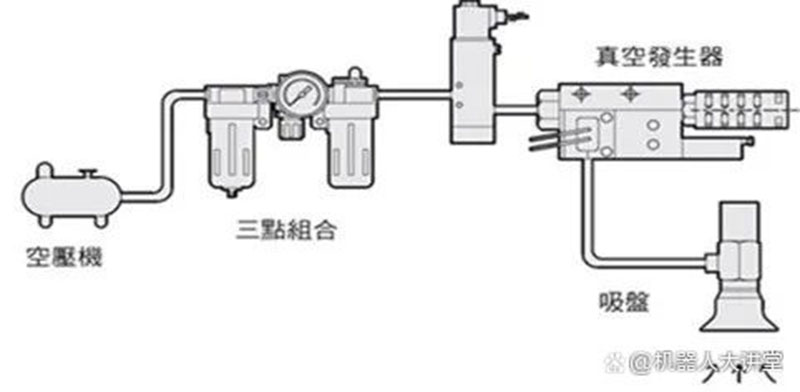
Ponadto, zgodnie z wymogami automatyki przemysłowej, w celu monitorowania procesu adsorpcji próżniowej, niektórzy producenci w ostatnich latach zazwyczaj dodają do systemu pneumatyczne elementy sterujące, takie jak przepływomierze, przełączniki detekcji ciśnienia i czujniki zbliżeniowe.
Ponieważ jednak większość komponentów jest modyfikowana przez integratora zgodnie z potrzebami klienta i warunkami pracy na miejscu, złożoność całego systemu jest często duża.
Jednocześnie wielu producentów komponentów prowadzi do skomplikowanych prac instalacyjnych i uruchomieniowych na miejscu, a niektórzy z nich charakteryzują się wysokim zużyciem energii i 100% zależnością od źródeł gazu.Częściowa integracja może nie być możliwa
Unikaj zanieczyszczenia hałasem, co oznacza niedopuszczalne problemy w środowiskach wymagających dużej precyzji i czystości, takich jak baterie litowe i półprzewodniki.
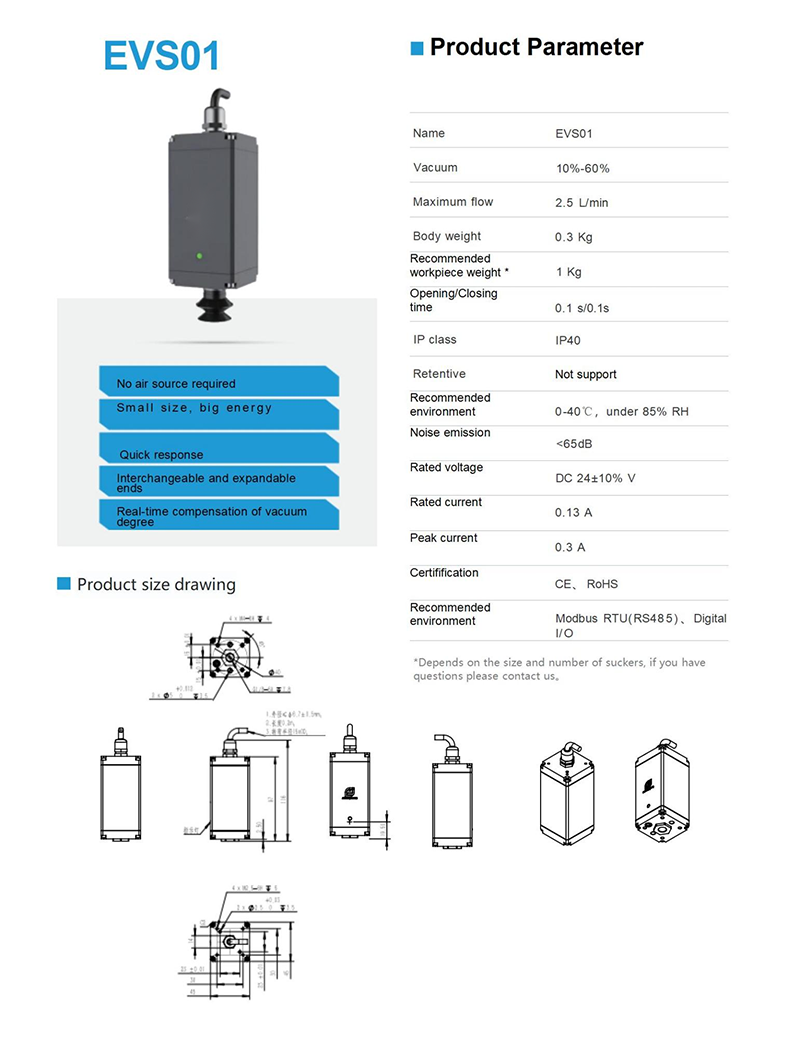
Ogólnie rzecz biorąc, EVS to nowa generacja elektrycznego, inteligentnego siłownika próżniowego, który nie wymaga dodatkowego źródła sprężonego powietrza, co niewątpliwie przyciąga wzrok.
Największą zaletą systemu oszczędzania powietrza jest łatwość montażu.Ponieważ może to niewątpliwie zmniejszyć liczbę podzespołów pomocniczych, w tym sprężarek powietrza, zbiorników magazynujących powietrze, urządzeń do oczyszczania powietrza i rur wyjściowych itp., czyniąc okablowanie łatwiejszym, wygodniejszym i przejrzystym dla klientów.
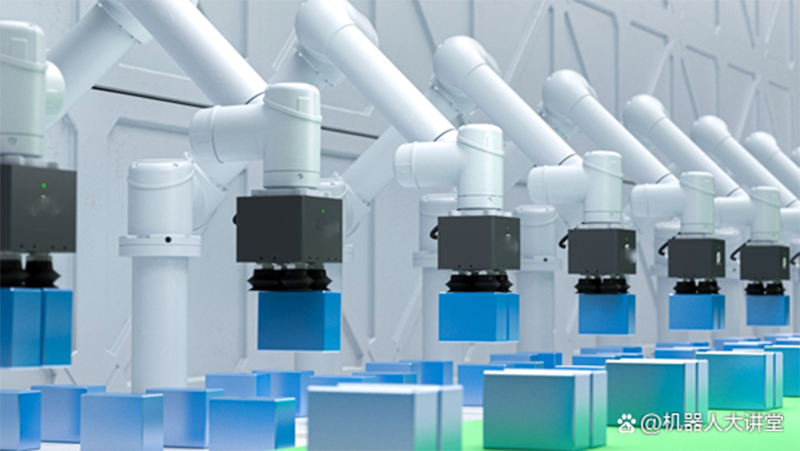
Z doniesień wynika, że obecnie wiele scen, w tym mobilne platformy robotów, montaż elektroniki 3C, produkcja baterii litowych, produkcja półprzewodników, logistyka ekspresowa itp., ma stosunkowo kompaktowy układ przestrzeni.
Bateria kwadratowa ssąca EVS08
Więcej szczegółów i zalet
Robotyczna sala wykładowa dowiedziała się, że ten produkt, który wygląda na bardzo mały i waży zaledwie 2,5 kg, może osiągnąć wysoki poziom 10 kg.Ze względu na konstrukcję niskonapięciową 24 V zużycie energii wynosi 20% tradycyjnego układu pneumatycznego, a siłę adsorpcji na końcu można ustawić i regulować, a siła adsorpcji może osiągnąć 102-510 N.
Jeśli chodzi o konstrukcję, w EVS zastosowano bardziej zwartą i lekką konstrukcję, dzięki czemu EVS jest o 30% mniejszy niż tradycyjna aerodynamika przy tej samej masie ładunku.
Jednocześnie można go bezpośrednio podłączyć do złącza na końcu ramienia robota, co pozwala na redukcję zbędnych elementów pomocniczych, czyni go bardziej elastycznym w użyciu, można go szybko rozłożyć i z łatwością może pomieścić wiele dużych obiektów, szczególnie nadaje się do układanie, przenoszenie i inne operacje na scenie.
W celu poprawy wygody użytkowania, elektryczny siłownik podciśnieniowy posiada także zintegrowany interfejs, za pomocą którego można sterować i monitorować cały proces adsorpcji obiektów.
Podaje się, że ma to na celu wygodę klientów, umożliwiającą kontrolowanie stopnia podciśnienia w siłowniku próżniowym za pomocą instrukcji, a także połączenie za pośrednictwem łącza IO w celu monitorowania i konserwacji predykcyjnej procesu adsorpcji.Monitorowanie stanu zmniejszy liczbę błędów i przestojów oraz zapewni dostępność systemu.
Na tej podstawie zalety i cechy EVS znajdują również odzwierciedlenie w następujących punktach:
1. Zwarta konstrukcja i niewielka waga: EVS jest o 30% mniejszy niż tradycyjny rozmiar pneumatyczny, gdy pochłania ten sam ciężar ładunku.Można go połączyć ze złączem na końcu ramienia mechanicznego, aby przejąć obciążenie, szczególnie przydatne przy układaniu w stosy, przenoszeniu i innych operacjach scenicznych;
2. Bogata konfiguracja terminala: Można skonfigurować różne typy przyssawek, poduszek powietrznych i innych komponentów, aby umożliwić chwytanie różnych obiektów, w tym elementów kwadratowych, kulistych i o specjalnych kształtach;
3. Podwójne kanały mogą być sterowane niezależnie: łatwo steruj lewą i prawą stroną siłownika próżniowego, a obie strony są od siebie niezależne, co dodatkowo poprawia wydajność pracy linii produkcyjnej.Realizuje jednocześnie zasysanie i umieszczanie, co znacznie ułatwia obsługę i sortowanie przedmiotów, oszczędzając miejsce i czas;
4. Regulowane ssanie: stopień podciśnienia można regulować w zależności od właściwości zasysanego produktu i można uzyskać kompensację podciśnienia w czasie rzeczywistym;
5. Informacja o stanie: Posiada czujnik sprzężenia zwrotnego próżni, który może wykryć stan adsorpcji obiektów w czasie rzeczywistym i zapewnić informację zwrotną i alarm;
6. Zabezpieczenie przed wyłączeniem: Po wyłączeniu zasilania może zrealizować samoblokowanie wyłączenia adsorpcyjnego, aby chronić zaadsorbowane obiekty;
7. Silna zdolność adaptacji: obsługa protokołu komunikacyjnego 24 V I/O i MODBUS RTU (RS485);
8. Łatwy w instalacji i debugowaniu: protokół komunikacyjny jest prosty i czytelny, co znacznie zmniejsza trudność debugowania.Ponadto w prezencie można dołączyć oprogramowanie do debugowania komputera hosta, które można ustawiać i edytować w celu ustawienia parametrów funkcji w trybie offline.
Podsumowanie i przyszłość
W trendzie automatyzacji i inteligencji elektryczne siłowniki próżniowe stają się w coraz większym stopniu kluczowym elementem zapewniającym normalne działanie robotów i systemów automatyki, dzięki czemu korzystanie z systemów siłowników elektrycznych jest wygodniejsze i łatwiejsze w użyciu oraz może spełniać bardziej zróżnicowane scenariusze, takie jak mobilne roboty kompozytowe..
Zintegrowany interfejs i bogata konfiguracja terminali oraz inne optymalizacje mogą jeszcze bardziej poprawić niezawodność kluczowych komponentów robota, zmniejszyć przestoje produkcyjne i problemy ze zdalnym wdrażaniem dla użytkowników końcowych, a także jeszcze bardziej obniżyć koszty konserwacji i obsługi posprzedażnej.
Czas publikacji: 19 kwietnia 2023 r